预约演示
更新于:2026-03-03

The University Hospital Balgrist
更新于:2026-03-03
概览
关联
NCT07398534
PICO Negative Pressure for the Treatment of Uninfected Foot Ulcers and Wound Dehiscence - an Unblinded, Randomized-controlled, Superiority Trial (BALPIC Trial)
NCT05524493
High-field MR Imaging in Migraine, Visual Snow and Epilepsy

NCT06813859
Monitored Effects of Physical Activity on Fetal Heart Rate by Using a Wireless Non-invasive Device
100 项与 The University Hospital Balgrist 相关的临床结果
登录后查看更多信息
登录后查看更多信息
2026-04-01Journal of Orthopaedics
Established acetabular radiological reference values can be reliably transferred to reconstructed parallel-beam 2D images from ultra-low-dose pelvic CT
Article
作者: Zingg, Patrick O ; Marth, Thomas ; Kaiser, Dominik ; Sutter, Reto ; Sommer, Stefan ; Klopfenstein, Arnaud
Background:
The anteroposterior radiograph of the pelvis is essential for diagnosing hip pathologies. Radiograph-like projections reconstructed as cone-beam images from CT data correlate strongly with conventional radiographs. However, CT inherently uses parallel x-rays rather than a cone-beam geometry. This study aims to determine whether parallel-beam radiograph-like projections from CT provide comparable reference values to cone-beam reconstructions.
Methods:
63 patients (126 hips) undergoing CT for symptomatic hip pathologies without prior hip surgery were included. From the same CT data, cone-beam and parallel-beam radiograph-like images were reconstructed using a standardized algorithm. Reference values, including lateral center-edge angle (LCEA), medial center-edge angle (MCEA), acetabular index (AI), acetabular arc (AA), extrusion index (EI), crossover sign, and posterior wall sign, were measured on both projection types, eliminating technical bias. Two observers performed all measurements twice to assess inter- and intra-observer reliability, and intraclass correlation coefficients (ICCs) were calculated.
Results:
126 hips were analyzed: 52 with LCEA <22° ("acetabular undercoverage"), 49 with LCEA 22°-33° ("normal coverage"), and 25 with LCEA >33° ("acetabular overcoverage"). ICCs between observers and between projection types demonstrated good to excellent reliability for all reference values (0.89-0.99).
Conclusion:
Parallel-beam radiograph-like projections demonstrate good to excellent reliability (ICCs: 0.89-0.99) for key reference values of hip pathologies compared to cone-beam radiograph-like projections from the same CT data. These findings suggest parallel beam projections can be reliably used with established reference values for conventional radiographs.
2026-03-15SPINE
The Role of Electrophysiological Workup in Lumbar Spinal Canal Stenosis (LSCS)
Article
作者: Schubert, Martin ; Duarte, Guichande ; Farshad, Mazda ; Spirig, José ; Hupp, Markus ; Curt, Armin ; Zipser, Carl M. ; Freund, Patrick
Study Design.:
Systematic literature review.
Objective.:
Update on diagnostic utility of electrophysiology in lumbar spinal canal stenosis (LSCS).
Summary of Background.:
LSCS is a highly prevalent degenerative spine condition characterized by neurogenic claudication, radicular pain, and muscle weakness. While lumbar spine MRI is the imaging modality for detecting spinal canal narrowing, it correlates poorly with clinical symptoms. Electrophysiological methods, including electromyography (EMG), nerve conduction studies (NCS), and evoked potentials (MEP and SEP), may provide complementary information on neural dysfunction. Current guidelines support paraspinal electromyography (EMG) mapping for symptomatic patients with imaging confirmed stenosis (grade B). In contrast, the diagnostic value of other electrophysiologic tests in LSCS remains uncertain.
Methods.:
A systematic literature search was conducted in Medline and Embase for original studies on LSCS between 2020 and 2024. Two independent reviewers screened studies for inclusion. The extracted data was synthesized qualitatively. Study quality was assessed using the Robins-V2 tool. PROSPERO registration (CRD42024622427).
Results.:
Thirteen studies met the inclusion criteria; study quality was moderate. Needle EMG of the limbs was evaluated in 23% of studies to detect denervation as a sign of radiculopathy. Twenty-three percent of the studies examined tibial nerve SEP or cauda equina MEP conduction time for lesion localization, with varying findings and utility for diagnosing LSCS. Surface EMG was investigated in 31% of studies and revealed significantly altered muscle activation patterns and compensatory gait adaptations in LSCS.
Conclusion.:
There is an increasing number of studies combining surface EMG with gait assessments and tasks. This approach is interesting for being noninvasive, with clinical utility to be further determined. On the basis of previous guidelines, paraspinal mapping is considered the gold-standard electrophysiological diagnostic tool. Interestingly, there were no recent studies on paraspinal mapping, indicating a shift to alternative methods.
2026-03-01JOURNAL OF ARTHROPLASTY
Obesity Class Does Not Associate With Incidence, Timing, or Invasiveness of Reoperations After Total Hip Arthroplasty
Article
作者: Weinblatt, Aaron I ; Oettl, Felix C ; Lan, Ranqing ; Parks, Michael ; Lyman, Stephen ; Della Valle, Alejandro Gonzalez
BACKGROUND:
Body mass index (BMI) cut-off values have been proposed to determine eligibility for elective total hip arthroplasty (THA) in obese patients. However, the relationship between the severity of obesity and reoperations remains poorly understood. We evaluated whether the World Health Organization (WHO) obesity class is independently associated with the risk, invasiveness, or timing of reoperations after THA in obese patients.
METHODS:
There were 7,022 patients who had a BMI ≥ 30 who underwent elective, unilateral THA for primary osteoarthritis between 2016 and 2022 at a tertiary care institution. The patients were grouped according to the WHO obesity classification: class 1 (60.7%, n = 4,265); 2 (26.2%, n = 1,840); and 3 (13.1%, n = 917). A chart review was conducted to identify individuals who underwent any closed or open reoperation requiring anesthesia, and to determine characteristics, including invasiveness and timing. Kaplan-Meier survival analysis was used to estimate the probability of survival over time. The reoperation was defined as the event of interest. The Cox proportional hazards regression model was used to analyze the impact of obesity class on time to reoperation, adjusting for age, sex, race, and Charlson Comorbidity Index.
RESULTS:
There were 67 patients (1.0%) who required at least one reoperation, with 17 undergoing two or more. The reoperation rates for class 1, 2, and 3 were 1% (n = 44), 0.9% (n = 17), and 0.7% (n = 6), respectively (P = 0.77). There were five minor procedures (7.5%), 27 open procedures with or without liner exchange (40.3%), and 35 revisions with acetabular and/or femoral component exchange (52.2%) performed. Survival analysis did not show a statistically significant difference between groups.
CONCLUSIONS:
In this cohort of obese patients who underwent THA, the WHO obesity class was not associated with risk, invasiveness, or timing of reoperations. Policies that preclude patients fromreceiving THA based solely on BMI may have limited efficacy in reducing reoperations following THA.
2023-07-21
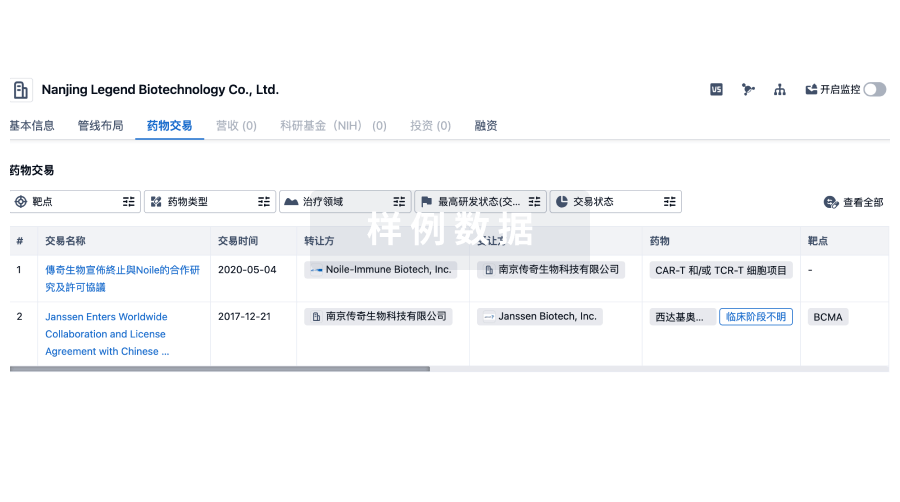
100 项与 The University Hospital Balgrist 相关的药物交易
登录后查看更多信息
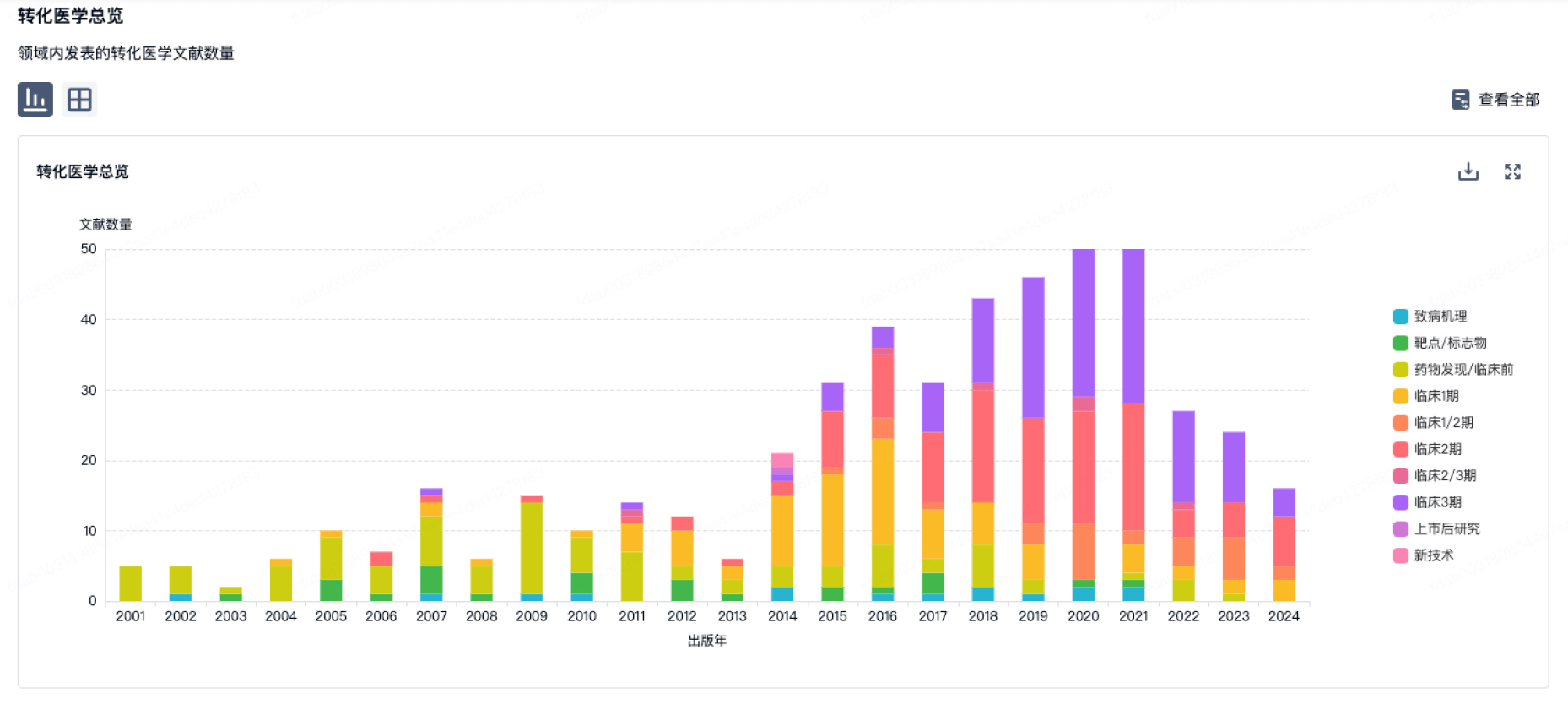
100 项与 The University Hospital Balgrist 相关的转化医学
登录后查看更多信息
组织架构
使用我们的机构树数据加速您的研究。
登录
或
管线布局
2026年07月18日管线快照
无数据报导
登录后保持更新
药物交易
使用我们的药物交易数据加速您的研究。
登录
或
转化医学
使用我们的转化医学数据加速您的研究。
登录
或
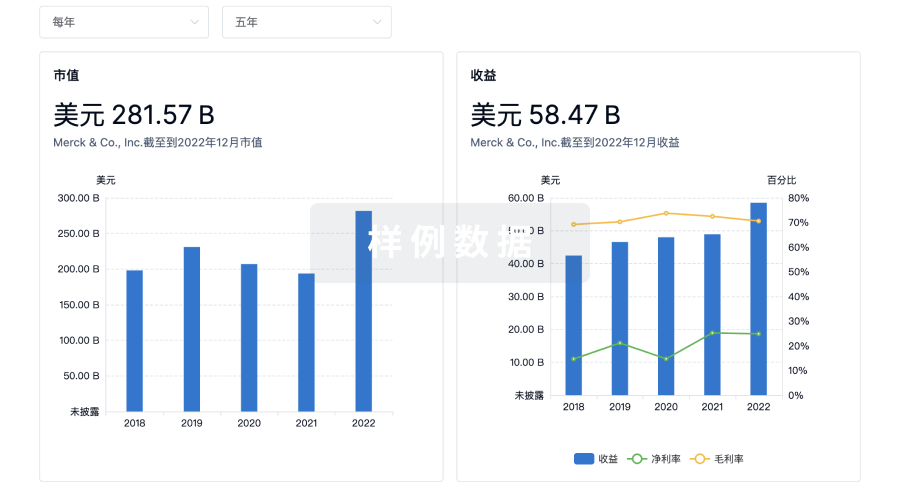
营收
使用 Synapse 探索超过 36 万个组织的财务状况。
登录
或
科研基金(NIH)
访问超过 200 万项资助和基金信息,以提升您的研究之旅。
登录
或

投资
深入了解从初创企业到成熟企业的最新公司投资动态。
登录
或
融资
发掘融资趋势以验证和推进您的投资机会。
登录
或
芽仔
全新生物医药AI Agent 覆盖科研全链路,让突破性发现快人一步
立即开始免费试用!
智慧芽新药情报库是智慧芽专为生命科学人士构建的基于AI的创新药情报平台,助您全方位提升您的研发与决策效率。
立即开始数据试用!
智慧芽新药库数据也通过智慧芽数据服务平台,以API或者数据包形式对外开放,助您更加充分利用智慧芽新药情报信息。
生物序列数据库
生物药研发创新
免费使用
化学结构数据库
小分子化药研发创新
免费使用