预约演示
更新于:2026-06-16
Shandong University of Science & Technology
更新于:2026-06-16
概览
标签
其他疾病
蛋白类药物
疾病领域得分
一眼洞穿机构专注的疾病领域

暂无数据
技术平台
公司药物应用最多的技术
靶点
公司最常开发的靶点
暂无数据
关联
靶点 |
作用机制 |
在研机构 |
原研机构 |
在研适应症 |
非在研适应症 |
最高研发阶段 |
首次获批国家/地区 |
首次获批日期 |
100 项与 山东科技大学 相关的临床结果
登录后查看更多信息
登录后查看更多信息
2026-10-01ULTRASONICS
Energy transfer mechanism and performance evaluation of the underwater ultrasonic drilling corer for seabed rock sampling
Article
作者: Li, He ; Song, Zekun ; Chen, Zhaoyang ; Yang, Shuo ; Cao, Chaoning ; Li, Zhongxin ; Zhang, Zhanpeng ; Cui, Shengqi
To address the problems of high-power consumption, large weight-on-bit, significant disturbance, and difficulties in sealing and waterproofing in the traditional Deep-sea Seafloor Drill, a novel piezoelectric-driven Underwater Ultrasonic Drilling Corer (UUDC) is proposed. Based on piezoelectric drive theory and nonlinear dynamics theory, the energy transfer mechanism of the UUDC is investigated, and its working principle is elucidated, which lays a theoretical foundation for the design and development of its key components. The nonlinear explicit dynamic analysis method is adopted to investigate the interaction mechanisms between the drilling tool and the rock under piezoelectric actuator and free mass actuation. The findings provide guidance for optimizing the dynamic parameters of UUDC and improving the structural design of the drilling tool. A drilling and coring test platform for the UUDC is established, experiments on the mechanical characteristics of drilling and coring are carried out, to verify the feasibility of the design, and evaluate its drilling and coring performance. The experimental results illustrate that the UUDC exerts a maximum drilling force of approximately 7.1 N on the rock, generating a surface stress of up to 2.5 MPa. Under a 5 N weight-on-bit, the device achieves a drilling depth of 20 mm within 2 min, with a coring success rate of 90% and a core recovery of 73.6%. The UUDC prototype efficiently drills into rock under a low weight-on-bit and reliably retrieves cores. It presents strong adaptability to deep-sea environments and compatibility with underwater vehicles, providing an effective solution for seabed rock coring.
2026-08-01NEURAL NETWORKS
Predefined-time consensus control for multiagent systems with input and output quantization
Article
作者: Cheng, Huidong ; Shi, Junyi ; Wang, Fang
For the predefined-time control problem of unknown nonlinear multi-agent systems (NMASs), a novel adaptive neural consensus control strategy is proposed. Unlike existing predefined-time control approaches, this strategy enables communication of input and output signals through a directed network, and incorporates quantization prior to communication. Firstly, a neural network is employed to approximate unknown functions. Based on the quantized information, a neural-network-based distributed state observer is designed to estimate the unmeasurable states. Secondly, this paper combines backstepping technique with command filtering technology, thereby avoiding the non-existence issue of partial derivatives of virtual control signals caused by output quantization. Moreover, the intermediate auxiliary control signal is constructed using a class of smooth functions. By substituting the quantized output for the continuous output, the actual controller is obtained. To analyze the predefined-time stability of the system, it is necessary to compensate for quantization errors. Based on this, Lemma 12 is proposed. Finally, in a predefined time frame, it is proven that the outputs of the followers converge to a neighborhood of the leader's output, while ensuring all signals within the closed-loop system remain bounded.
2026-08-01NEURAL NETWORKS
Handling distribution shifts on dynamic graphs via causal invariance principles
Article
作者: Zeng, Qingtian ; Song, Qianyu ; Li, Chao ; Zhang, Yafei ; Liu, Runshuo ; Zhao, Zhongying
Dynamic Graph Neural Networks (DyGNNs) typically assume that training and test data follow an independent and identically distributed assumption. However, in real-world scenarios, the evolving nature of dynamic graph structures violates the assumption, causing classic deep learning models to fail to generalize to test data. In this paper, we propose DCIP to handle Distribution Shifts on Dynamic Graphs via Causal Invariance Principles, which aims to uncover causal patterns that remain stable across environments and thereby addressing distribution shifts. Specifically, we first develop a multi-feature extraction module to explore implicit node interaction patterns via interaction frequency coding. Additionally, we design a frequency-domain causal disentanglement architecture that combines Fourier Transform and Transformer to separate causal patterns from non-causal patterns. Finally, we introduce a virtual intervention regularization strategy that actively perturbs non-causal components to generate a set of intervention distributions, thereby enforcing the stability of the learned causal modes across shifting environments. Extensive experiments on six dynamic graph datasets and four distribution shift datasets demonstrate that DCIP consistently outperforms existing methods in multiple tasks. The code is publicly available at https://github.com/zhabng/DCIP.
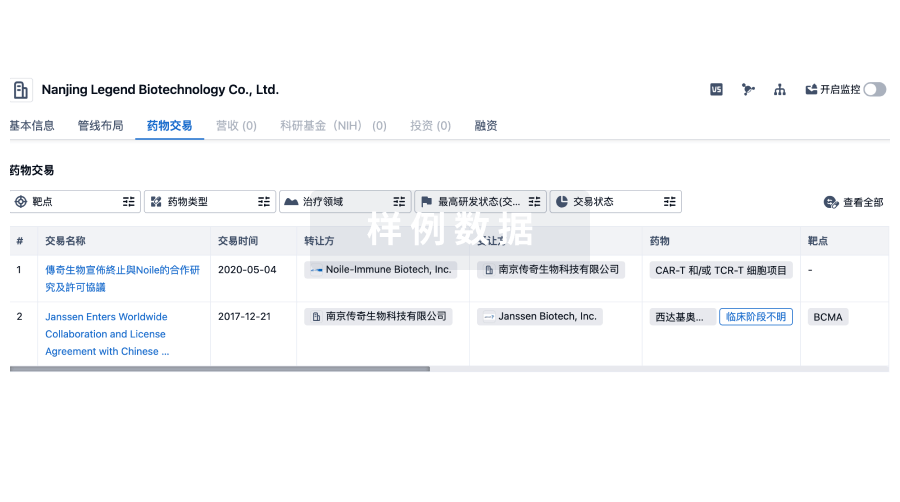
100 项与 山东科技大学 相关的药物交易
登录后查看更多信息
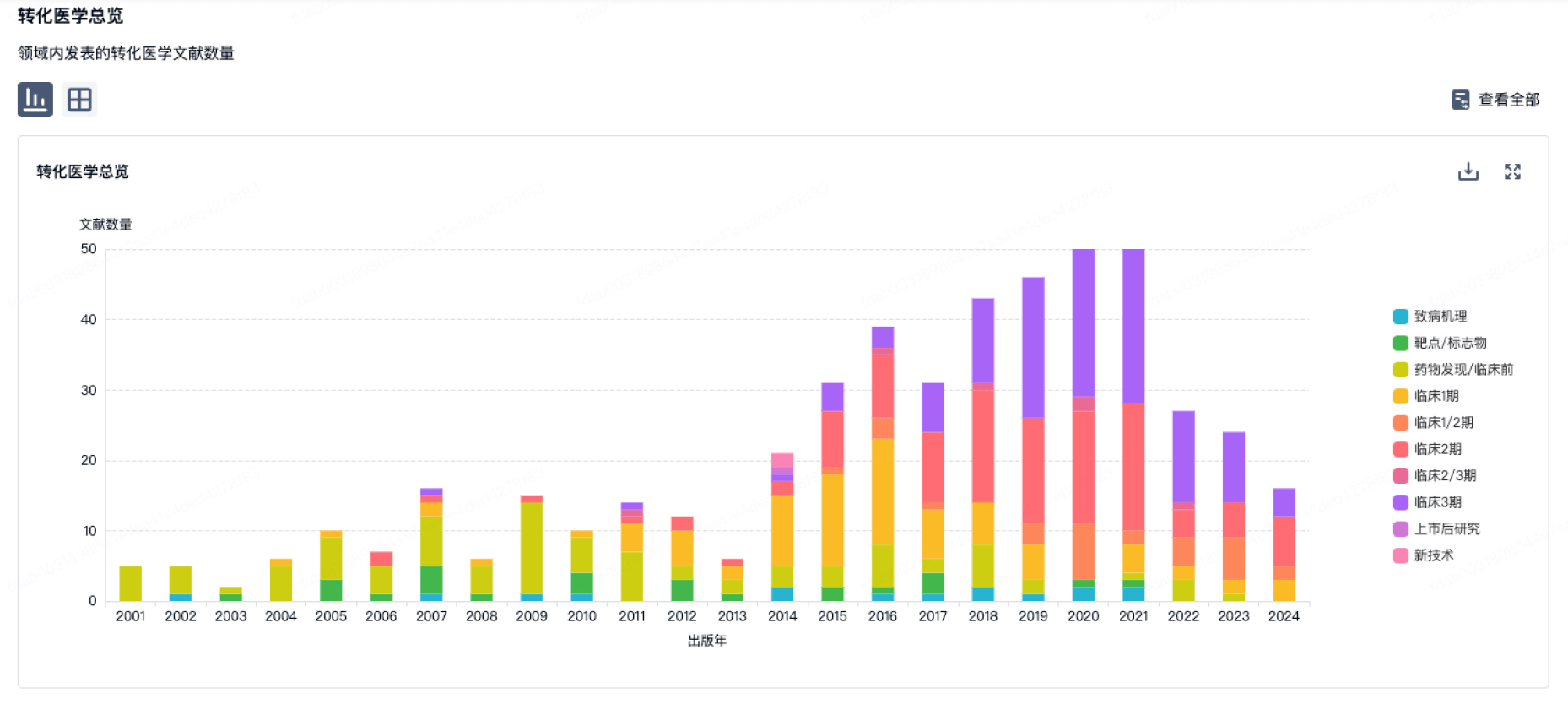
100 项与 山东科技大学 相关的转化医学
登录后查看更多信息
组织架构
使用我们的机构树数据加速您的研究。
登录
或
管线布局
2026年07月22日管线快照
管线布局中药物为当前组织机构及其子机构作为药物机构进行统计,早期临床1期并入临床1期,临床1/2期并入临床2期,临床2/3期并入临床3期
临床前
1
登录后查看更多信息
当前项目
登录后查看更多信息
药物交易
使用我们的药物交易数据加速您的研究。
登录
或
转化医学
使用我们的转化医学数据加速您的研究。
登录
或
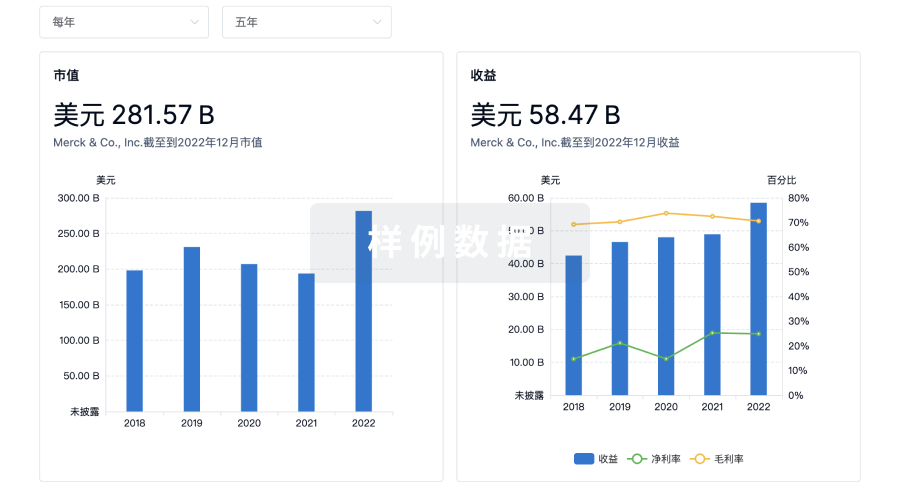
营收
使用 Synapse 探索超过 36 万个组织的财务状况。
登录
或
科研基金(NIH)
访问超过 200 万项资助和基金信息,以提升您的研究之旅。
登录
或

投资
深入了解从初创企业到成熟企业的最新公司投资动态。
登录
或
融资
发掘融资趋势以验证和推进您的投资机会。
登录
或
芽仔
全新生物医药AI Agent 覆盖科研全链路,让突破性发现快人一步
立即开始免费试用!
智慧芽新药情报库是智慧芽专为生命科学人士构建的基于AI的创新药情报平台,助您全方位提升您的研发与决策效率。
立即开始数据试用!
智慧芽新药库数据也通过智慧芽数据服务平台,以API或者数据包形式对外开放,助您更加充分利用智慧芽新药情报信息。
生物序列数据库
生物药研发创新
免费使用
化学结构数据库
小分子化药研发创新
免费使用