预约演示
更新于:2026-07-02
Beijing University of Technology
更新于:2026-07-02
概览
标签
肿瘤
神经系统疾病
其他疾病
小分子化药
溶瘤病毒
蛋白水解靶向嵌合体(PROTAC)
疾病领域得分
一眼洞穿机构专注的疾病领域

技术平台
公司药物应用最多的技术
靶点
公司最常开发的靶点
关联
靶点 |
作用机制 |
在研机构 |
原研机构 |
在研适应症 |
非在研适应症 |
最高研发阶段 |
首次获批国家/地区 |
首次获批日期 |
靶点 |
作用机制 |
在研机构 |
原研机构 |
在研适应症 |
非在研适应症 |
最高研发阶段 |
首次获批国家/地区 |
首次获批日期 |
靶点 |
作用机制 |
在研机构 |
原研机构 |
在研适应症 |
非在研适应症 |
最高研发阶段 |
首次获批国家/地区 |
首次获批日期 |
ChiCTR2100047745
Efficacy and safety of sequential hydrogen inhalation and hyperbaric oxygen therapy in patients with moderate to severe traumatic brain injury: a prospective, randomized, double-blind, controlled trial
ChiCTR2300071412
Establishment of intelligent image aided diagnosis platform for colorectal adenoma and cancer risk prediction model based on multimodal feature fusion of traditional Chinese and Western Medicine
ChiCTR-DCC-09000609
Comparative test between noninvasive cardiovascular function detection with pulse wave and color doppler ultrasound
100 项与 北京工业大学 相关的临床结果
登录后查看更多信息
登录后查看更多信息
2026-12-31MECHANICS OF ADVANCED MATERIALS AND STRUCTURES
Integration of three-beam laser interference lithography and metal assisted chemical etching for enhanced electrical and antireflection characteristics in Si micro/nano structures
作者: Zia, Ali ; Tariq, Sana ; Arshad, Kinza ; Liao, Changrui ; Saeed, Sadaf ; Shakoor, Umema ; Wang, Zuobin
The integration of three-beam laser interference lithog. (TBLIL) and Metal-Assisted Chem. Etching (MACE) is a novel approach to enhance the elec. and antireflection properties of silicon micro/nanostructures (SiMNs) for advanced optoelectronic applications.This study explored the fabrication, theor. modeling, and performance evaluation of SiMNs with enhanced light absorption, elec. conductivity, and reduced surface reflectance.A three-dimensional finite-difference time-domain (FDTD) method was employed to simulate and optimize the surface texture design for improved light absorption.The elec. and optical characteristics of the fabricated SiMNs were thoroughly examinedThe simulated and exptl. results exhibited comparable trends.The integration of TBLIL and MACE not only offers a precise and scalable method for structuring SiMNs, but also provides valuable insights for the development of high-efficiency optoelectronic devices, positioning these arrays as promising candidates for next-generation technologies.
2026-11-01NEURAL NETWORKS
Adaptive critic designs for event-based multi-agent systems with asymmetric constraints
Article
作者: Wang, Ding ; Ma, Xinrui ; Yan, Wenting ; Qiao, Junfei
In this paper, based on the adaptive critic control method, an improved event-based distributed control mechanism is established for continuous-time nonlinear multi-agent systems. Notably, to address the consensus control problem when the structure of the leader model differs from that of the follower model, an enhanced control strategy is developed in this paper. Furthermore, a suitable non-quadratic function is formulated to satisfy the asymmetric constraints. Subsequently, an event-triggered mechanism is introduced to conserve communication resources and improve control efficiency. In this process, an innovative triggering condition is presented. Meanwhile, theoretical analysis is conducted to avoid the Zeno behavior. Additionally, by constructing a critic neural network for each follower, the event-triggered near-optimal control law is obtained. Subsequently, the Lyapunov method is employed to guarantee the stability of both the neighborhood synchronization errors and weight estimation errors. Finally, a simulation example is provided to validate the effectiveness of the established mechanism.
2026-10-01ULTRASONICS
Fast frequency-domain symbolic coherence total focusing method for array electromagnetic acoustic transducer
Article
作者: Chen, Long ; Liu, Zenghua ; Zheng, Yang ; Tan, Jidong ; Zhang, Zongjian ; Fu, Zhengguo
Array-based non-destructive testing (NDT) has become a key advancement in modern NDT, offering large-area coverage, rapid imaging, and real-time data acquisition, significantly improving inspection efficiency and underpinning automated and intelligent inspection systems. Among array-based methods, electromagnetic acoustic transducers (EMATs) stand out as a non-contact method that eliminates the need for coupling agents, making them particularly well-suited for inspecting coated components and performing high-temperature in-line monitoring. Moreover, Array EMAT provide more intuitive, higher-resolution imaging, enhancing defect characterization and interpretation. Based on the full matrix capture of array EMAT, this study develops a fast frequency-domain signed coherence total focusing method. Derived from the rigorous solution of the wave equation, the frequency-domain algorithm offers clearer images compared to the time-domain delay-and-sum method. The introduction of the double-square-root vertical wavenumber significantly reduces the computational complexity of wavefield extrapolation. Meanwhile, the combination of frequency-domain zero-padding and time-domain interpolation effectively balances computational efficiency and spatial resolution. Gaussian filtering and the signed coherence factor are incorporated to suppress incoherent noise and mitigate the blind zones caused by electrical pulse crosstalk between array elements. Experimental results demonstrate that the array EMAT integrated with the advanced frequency-domain algorithm achieves an effective detection depth of 75 mm, with a single image computation time of only approximately 0.59 s. Moreover, it provides high-contrast and high-spatial-resolution detection results for multiple defects and adjacent defects. This research demonstrates the potential of array EMAT, combined with the proposed frequency-domain imaging algorithm, for future on-line non-destructive testing applications.
100 项与 北京工业大学 相关的药物交易
登录后查看更多信息
100 项与 北京工业大学 相关的转化医学
登录后查看更多信息
组织架构
使用我们的机构树数据加速您的研究。
登录
或
管线布局
2026年07月21日管线快照
管线布局中药物为当前组织机构及其子机构作为药物机构进行统计,早期临床1期并入临床1期,临床1/2期并入临床2期,临床2/3期并入临床3期
药物发现
3
21
临床前
其他
2
登录后查看更多信息
当前项目
登录后查看更多信息
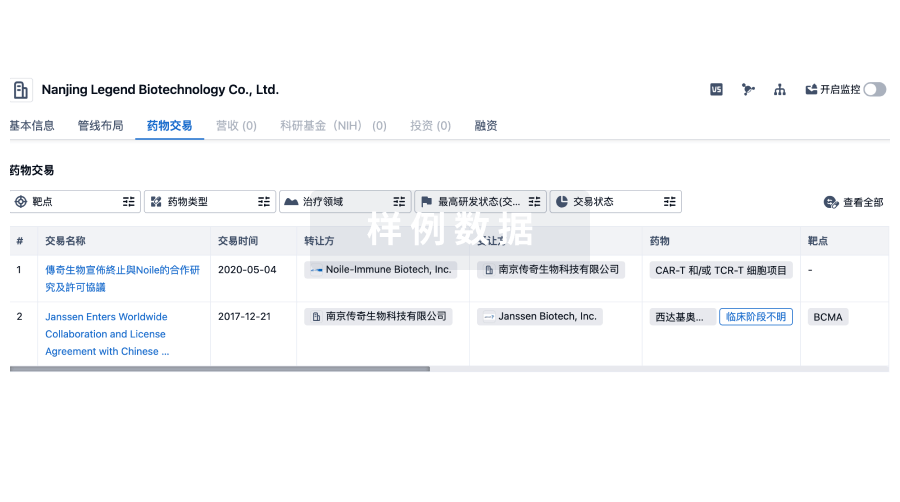
药物交易
使用我们的药物交易数据加速您的研究。
登录
或
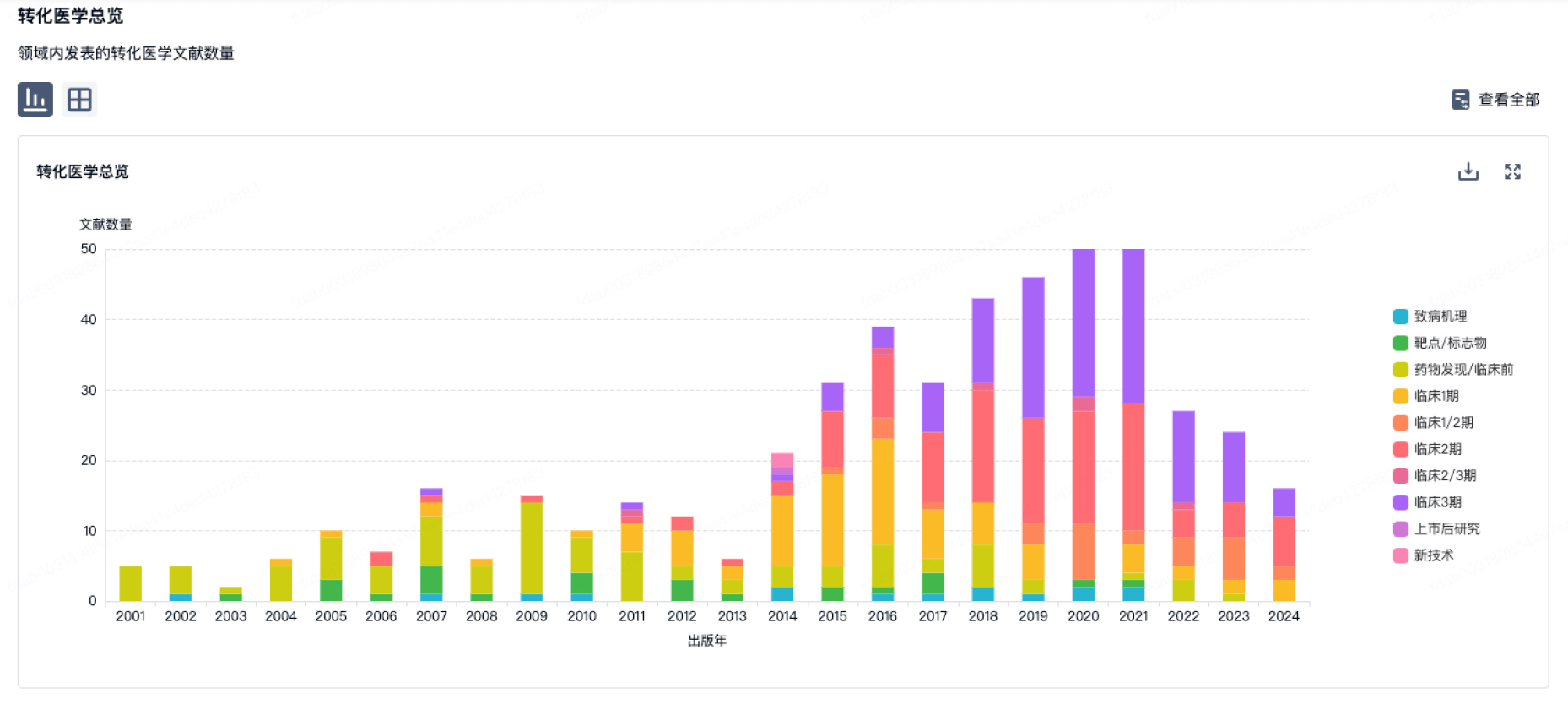
转化医学
使用我们的转化医学数据加速您的研究。
登录
或
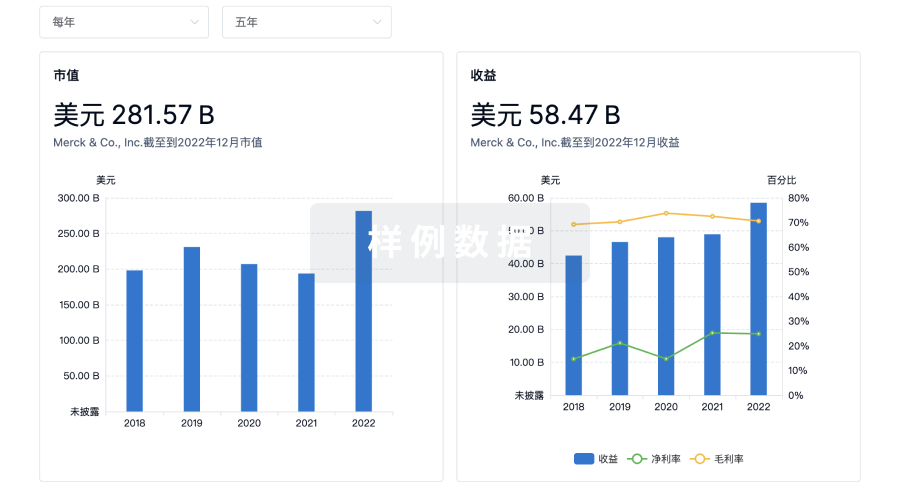
营收
使用 Synapse 探索超过 36 万个组织的财务状况。
登录
或
科研基金(NIH)
访问超过 200 万项资助和基金信息,以提升您的研究之旅。
登录
或

投资
深入了解从初创企业到成熟企业的最新公司投资动态。
登录
或
融资
发掘融资趋势以验证和推进您的投资机会。
登录
或
芽仔
全新生物医药AI Agent 覆盖科研全链路,让突破性发现快人一步
立即开始免费试用!
智慧芽新药情报库是智慧芽专为生命科学人士构建的基于AI的创新药情报平台,助您全方位提升您的研发与决策效率。
立即开始数据试用!
智慧芽新药库数据也通过智慧芽数据服务平台,以API或者数据包形式对外开放,助您更加充分利用智慧芽新药情报信息。
生物序列数据库
生物药研发创新
免费使用
化学结构数据库
小分子化药研发创新
免费使用