预约演示
更新于:2026-03-08

Incheon National University
更新于:2026-03-08
概览
标签
内分泌与代谢疾病
肿瘤
其他疾病
小分子化药
疾病领域得分
一眼洞穿机构专注的疾病领域

技术平台
公司药物应用最多的技术
靶点
公司最常开发的靶点
关联
靶点 |
作用机制 |
在研机构 |
原研机构 |
在研适应症 |
非在研适应症 |
最高研发阶段 |
首次获批国家/地区 |
首次获批日期 |

靶点 |
作用机制 |
在研机构 |
原研机构 |
在研适应症 |
非在研适应症 |
最高研发阶段 |
首次获批国家/地区 |
首次获批日期 |
靶点 |
作用机制 |
在研机构 |
原研机构 |
在研适应症 |
非在研适应症 |
最高研发阶段 |
首次获批国家/地区 |
首次获批日期 |
100 项与 Incheon National University 相关的临床结果
登录后查看更多信息
登录后查看更多信息
2026-05-01Bioactive Materials
Engineered atopic dermatitis models for recreating hypoxic conditions in atopic dermatitis microenvironments
Article
作者: Woo, Wonjin ; Lee, Eunji ; Kim, Su Min ; Na, Kyeong Seok ; Lee, Jina ; Choi, Jungmin ; Park, Kyung Min ; Park, Jooyoung ; Kim, Lark Kyun
Atopic dermatitis (AD) is a chronic inflammatory condition with severe itching. The complex physiology and diverse pathogenesis of AD complicate the prediction of clinical outcomes. Therefore, it is essential to develop preclinical models closely mimicking features of AD. Herein, gelatin-based in situ crosslinkable hydrogel AD models are engineered replicating the characteristics of AD tissue. First, public data of patients with AD is used to confirm the following, using single-cell RNA sequencing analysis: (1) collagen type VI alpha 5 chain (COL6A5+) fibroblast expression in patient tissues, (2) cell interaction with dorsal root ganglions that induce itching, and (3) overexpression of hypoxia-related factors in AD tissues. Based on these characteristics, an artificial AD model is developed using gelatin-based in situ crosslinked hydrogels. 3D cell culture systems are fabricated by encapsulating cells within hydrogels, supporting 3D cell survival and growth. These models exhibit a hypoxic (pO2 < 5 %) environment within the hydrogels, with upregulated expression of hypoxia-related genes. In these hydrogel-based skin models, the AD microenvironment is recreated, inducing immune responses and chronic hypoxia through IL-4 treatment and controlled oxygen concentration. Overexpression of itch-related factors, evaluation of drug response to treatment, and gene upregulation under hypoxic and immune conditions are also analyzed in the models. Our platforms are potential preclinical models for drug screening and fundamental research.
2026-05-01MICROBIOLOGICAL RESEARCH
Genomic insights into high-yield carotenoid production from renewable resources in radiation-resistant Deinococcus yunweiensis KCTC3955 and its optimization through fed-batch fermentation
Article
作者: Hwang, Chi Young ; Cho, Eui-Sang ; Seo, Myung-Ji ; Jung, Jong-Hyun ; Jeong, Soyoung
The environmental impacts of climate change highlight the need for sustainable bioprocesses using low-cost feedstocks. Microbial fermentation offers an eco-friendly method to produce value-added compounds from renewable resources. Deinoxanthin, a unique carotenoid pigment produced by radiation-resistant bacteria, Deinococcus, has pharmaceutical and food industry applications. However, most microorganisms preferentially utilize glucose as their primary carbon source, limiting their capacity to ferment byproducts or waste-derived resources effectively. Here, we hypothesized that identifying microbial hosts capable of metabolizing a broader range of nutrients could improve fermentation efficiency. Through whole-genome sequencing, we identified that D. yunweiensis KCTC3955 possesses multiple nutrient transporters and is capable of efficiently utilizing glycerol and various nitrogen sources for carotenoid production. Using one-factor-at-a-time and response surface methodologies, we optimized conditions with glycerol, achieving a 4.45-fold increase in carotenoid yield. Notably, key biosynthetic genes (dxr, idi, ispF, ispH, and cruF) were highly up-regulated under mixed nutrient conditions. Fed-batch fermentation with mixed renewable resources such as glycerol and corn steep liquor reached 23.22 mg/L carotenoid production and 15.48 mg/L/day productivity after 36 h, representing over 11- and 15-fold improvements compared to non-optimized conditions. These results highlight D. yunweiensis KCTC3955 as a strong candidate for carotenoid production from mixed renewable substrates.
2026-04-01MECHANISMS OF AGEING AND DEVELOPMENT
Vitisin B rejuvenates senescence via WBP2NL regulation
Article
作者: Park, Joon Tae ; So, Byeonghyeon ; Yoon, Jee Hee ; Lee, Kyeong Seon ; Byun, Youngjoo ; Oh, Sekyung ; Lee, Ki Yong ; Kwon, Hyung Wook ; Lee, Yun Haeng ; Kim, Duyeol ; Kim, Minseon ; Park, Ji Ho ; Lee, Yoo Jin
One of the main factors contributing to aging is reactive oxygen species (ROS), which are produced by dysfunctional mitochondria. Reducing ROS generation is considered an essential treatment for senescence, but no effective treatment has been developed yet. In this study, vitisin B, a tetramer of resveratrol, was found to be an efficient reagent that reduces mitochondrial ROS generation after screening phenylpropanoids (PPs), metabolites produced to overcome ROS-mediated stress in plants. Vitisin B induced mitochondrial functional recovery by activating mitophagy and removing dysfunctional mitochondria. Mitochondrial functional recovery by vitisin B decreased mitochondrial ROS, a by-product generated from dysfunctional mitochondria. In addition, ROS reduction by vitisin B restored senescence-associated phenotypes. RNA sequencing identified WBP2 N-Terminal Like (WBP2NL) as a gene essential for vitisin B-mediated senescence rejuvenation. Knockdown of WBP2NL exhibited effects similar to those of vitisin B, reducing mitochondrial ROS generation and consequently reversing senescence-associated phenotypes. This study elucidates a novel mechanism by which vitisin B reverses senescence by lowering mitochondrial ROS generation. This discovery opens the way to new therapeutic options to control aging by modulating mitochondrial ROS production.
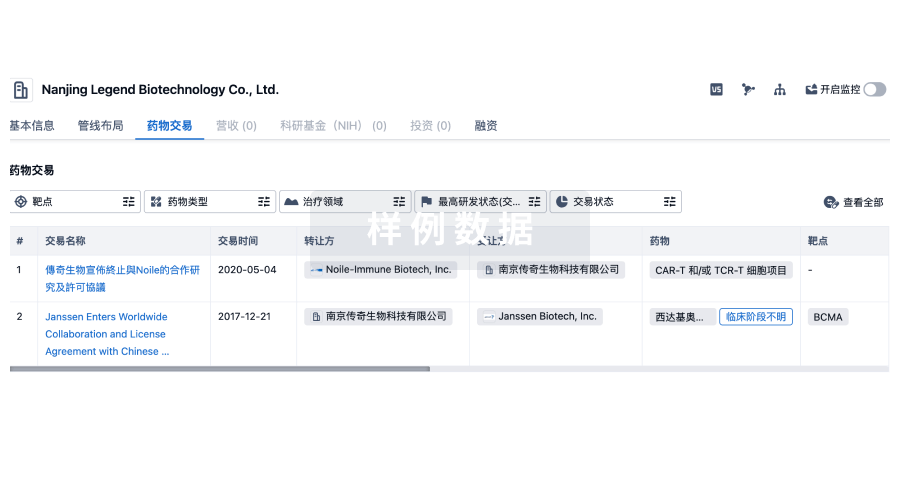
100 项与 Incheon National University 相关的药物交易
登录后查看更多信息
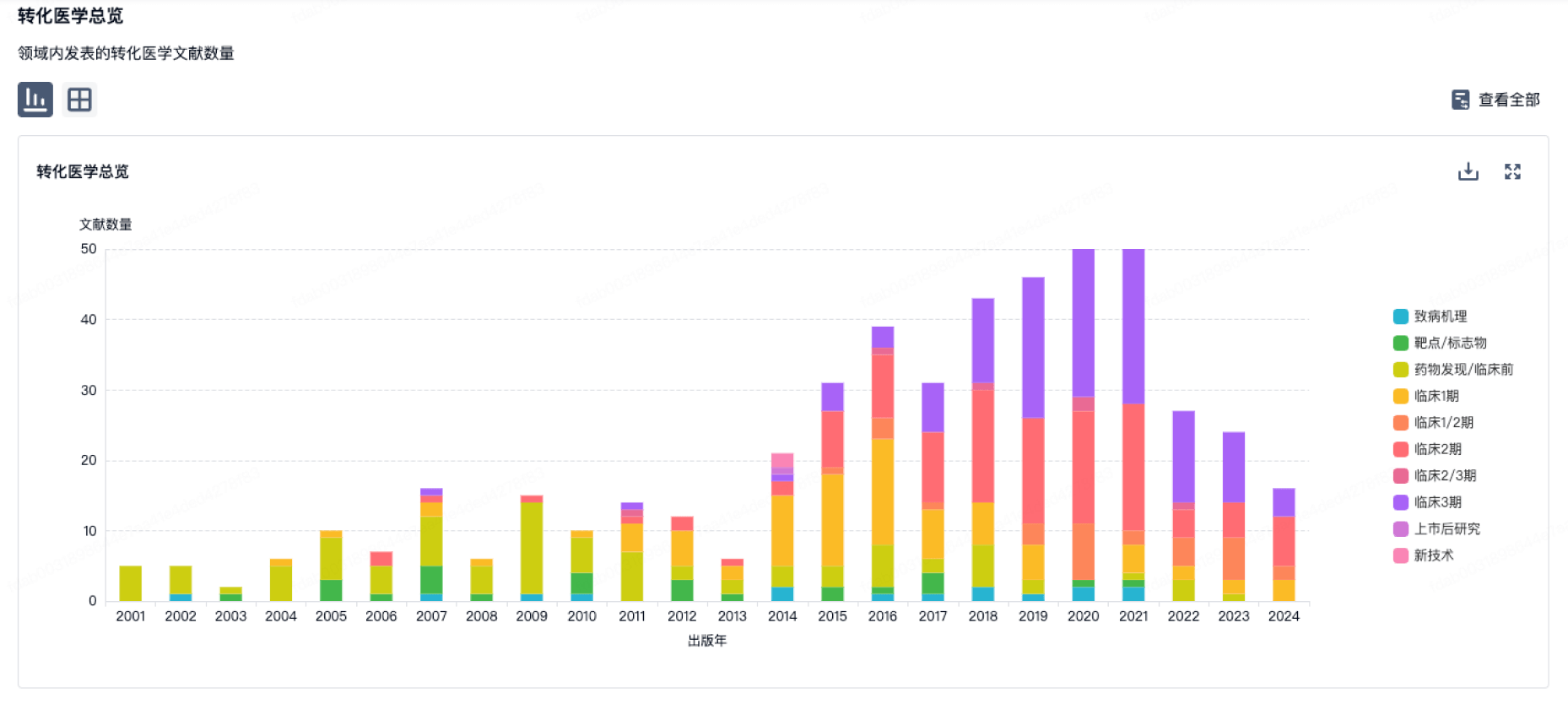
100 项与 Incheon National University 相关的转化医学
登录后查看更多信息
组织架构
使用我们的机构树数据加速您的研究。
登录
或
管线布局
2026年07月26日管线快照
管线布局中药物为当前组织机构及其子机构作为药物机构进行统计,早期临床1期并入临床1期,临床1/2期并入临床2期,临床2/3期并入临床3期
药物发现
1
2
临床前
其他
1
登录后查看更多信息
当前项目
登录后查看更多信息
药物交易
使用我们的药物交易数据加速您的研究。
登录
或
转化医学
使用我们的转化医学数据加速您的研究。
登录
或
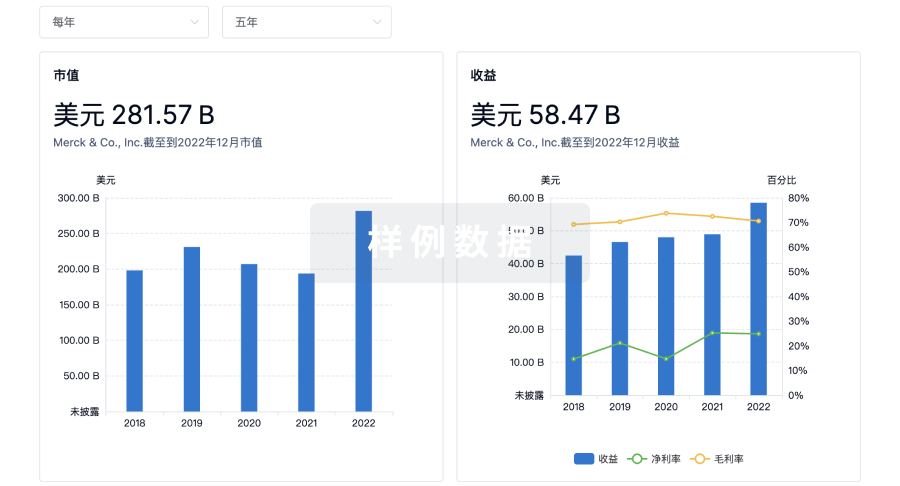
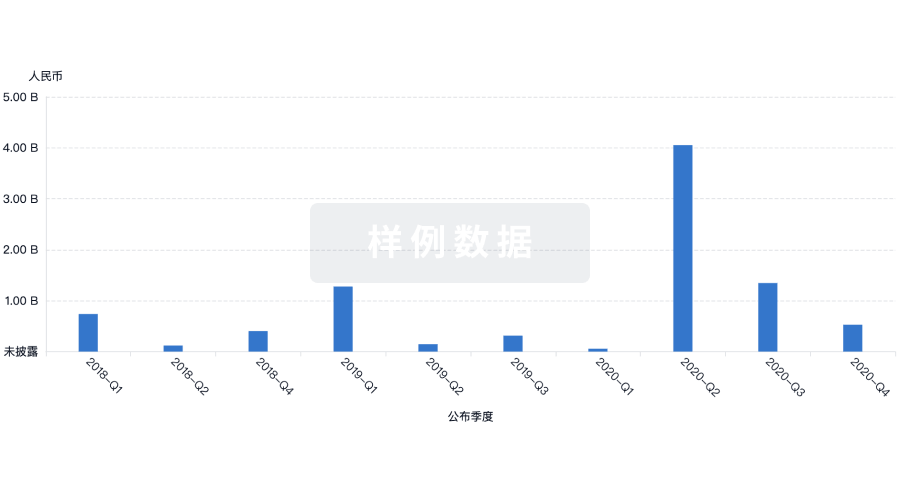
营收
使用 Synapse 探索超过 36 万个组织的财务状况。
登录
或
科研基金(NIH)
访问超过 200 万项资助和基金信息,以提升您的研究之旅。
登录
或

投资
深入了解从初创企业到成熟企业的最新公司投资动态。
登录
或

融资
发掘融资趋势以验证和推进您的投资机会。
登录
或
芽仔
全新生物医药AI Agent 覆盖科研全链路,让突破性发现快人一步
立即开始免费试用!
智慧芽新药情报库是智慧芽专为生命科学人士构建的基于AI的创新药情报平台,助您全方位提升您的研发与决策效率。
立即开始数据试用!
智慧芽新药库数据也通过智慧芽数据服务平台,以API或者数据包形式对外开放,助您更加充分利用智慧芽新药情报信息。
生物序列数据库
生物药研发创新
免费使用
化学结构数据库
小分子化药研发创新
免费使用