预约演示
更新于:2026-06-15
Chongqing University of Arts & Sciences
更新于:2026-06-15
概览
标签
肿瘤
血液及淋巴系统疾病
其他疾病
小分子化药
疾病领域得分
一眼洞穿机构专注的疾病领域

技术平台
公司药物应用最多的技术
靶点
公司最常开发的靶点
关联
靶点 |
作用机制 |
在研机构 |
原研机构 |
在研适应症 |
非在研适应症 |
最高研发阶段 |
首次获批国家/地区 |
首次获批日期 |
靶点 |
作用机制 |
在研机构 |
原研机构 |
在研适应症 |
非在研适应症 |
最高研发阶段 |
首次获批国家/地区 |
首次获批日期 |
CN119661499
专利挖掘靶点 |
作用机制 |
在研机构 |
原研机构 |
在研适应症 |
非在研适应症 |
最高研发阶段 |
首次获批国家/地区 |
首次获批日期 |
100 项与 重庆文理学院 相关的临床结果
登录后查看更多信息
登录后查看更多信息
2026-09-01APPLIED ERGONOMICS
Research on a motion sickness prediction model for vehicle occupants based on vehicle dynamics parameter thresholds
Article
作者: Wu, Yingzhang ; Tang, Bangbei ; Tang, Qiuyang ; Luo, Bingjie
The ride comfort of autonomous vehicles is affected by motion sickness. This study quantifies the thresholds of vehicle dynamics parameters that induce motion sickness in both curved and straight-road scenarios, and constructs a predictive model. The results show that on S-shaped curves, the lateral acceleration thresholds (Δay) for moderate motion sickness (M2) and severe motion sickness (M3) are 0.398 m/s2 and 0.419 m/s2, respectively, while the Z-axis angular velocity thresholds (Gyroz_mean) are 6.876°/s and 8.022°/s. In straight-road scenarios, the Δay thresholds for M2 and M3 are 0.394 m/s2 and 0.648 m/s2, respectively, and the maximum longitudinal velocity (vx_max) reaches 13.961 m/s and 18.492 m/s. The proposed model achieves an accuracy of 86% for M2 and 82% for M3. Real-vehicle validation demonstrated that dynamically controlling vehicle motion states to maintain lateral acceleration, angular velocity, and longitudinal velocity below the specified thresholds reduced overall motion sickness risk by 39.7%.
2026-05-20ACS Applied Materials & Interfaces
Realizing Multidimensional UV/X-Ray Visualization Detection via Ionic Site Migration
Article
作者: Dai, Heng ; Zhang, Ziyi ; Zhu, Anxi ; Xue, Yuan ; Liu, Zhichao ; Zeng, Yajun ; Liu, Junli ; Liu, Bitao ; Wang, Xinran ; Xu, Xuhui
Visualizing concealed optical information by using optical materials enables the identification of hidden threats and early risk warnings. However, current approaches to multimode optical detection using fluorescent materials often employ composite luminescence from multiple rare-earth ions, significantly limiting their application. Here, Mn2+ ions are introduced into LiAlO2 and ingeniously utilize multisite occupation to achieve visual detection of both UV and X-ray radiation. Compared to the yellow photoluminescence (PL) and green long-persistent luminescence (LPL) of LiAlO2:Mn2+, the LPL following X-ray irradiation exhibits a similar yellow emission. However, controlling temperature changes reveals a remarkable yellow-to-green color shift in the high-temperature LPL following X-ray irradiation at temperatures above 398 K. The integration of PL with LPL establishes a novel technical paradigm for designing multimode optical visualization detection materials.
2026-05-01Journal of Advanced Research
The role of induced resistance in mitigating postharvest fungal diseases in fruits and vegetables
Review
作者: Duan, Bin ; Deng, Wei ; Li, Zhen ; Sui, Yuan ; Xiao, Xianmei
BACKGROUND:
The process of fruit ripening after harvest renders them susceptible to water loss and disease development by fungal pathogens. Postharvest fungal diseases compromise produce quality and reduce marketable yield, resulting in economic losses and increased food wastage. Fungal disease development is mitigated by plant defense response, fungal pathogenicity factors and control interventions. Induced resistance in harvested fruits has been reported to mitigate disease development by modulating the processes of ripening and senescence, which contributes to the level of host resistance against decay fungi.
AIM OF REVIEW:
The purpose of this review is to provide a comprehensive overview of our current understanding of induced resistance in harvested fruit, and its potential application in the management of postharvest diseases. We hope to provide a scientific information to optimize postharvest practices, improve product quality, prolong shelf-life, and enhance the overall management of harvested and stored produce.
KEY SCIENTIFIC CONCEPTS OF REVIEW:
Technologies designed to induce host resistance in harvested fruit has been gaining increased interest. This review provides an overview and discussion of recent advances in our understanding of infection mechanisms used by postharvest fungal pathogens, host defense response in harvested produce, and novel ecological, environmental-friendly strategies that enhance host resistance. Existing issues, obstacles and topics of future research are also discussed. Our review highlights the significant scientific and practical potential for the development of methods designed to enhance the resistance of fruit to postharvest pathogens and underscores the need to develop innovative management strategies that mitigate postharvest diseases and their impact on fruit quality, yield, and monetary value.
100 项与 重庆文理学院 相关的药物交易
登录后查看更多信息
100 项与 重庆文理学院 相关的转化医学
登录后查看更多信息
组织架构
使用我们的机构树数据加速您的研究。
登录
或
管线布局
2026年07月24日管线快照
管线布局中药物为当前组织机构及其子机构作为药物机构进行统计,早期临床1期并入临床1期,临床1/2期并入临床2期,临床2/3期并入临床3期
药物发现
3
2
临床前
其他
1
登录后查看更多信息
当前项目
登录后查看更多信息
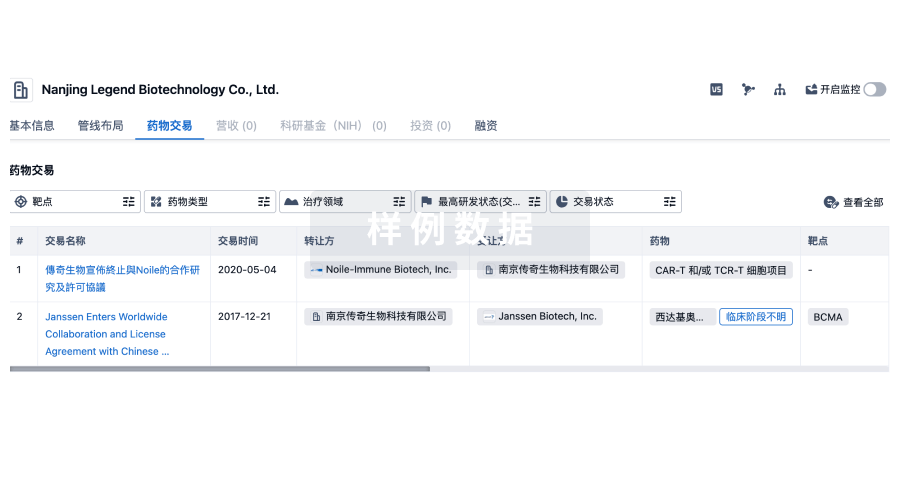
药物交易
使用我们的药物交易数据加速您的研究。
登录
或
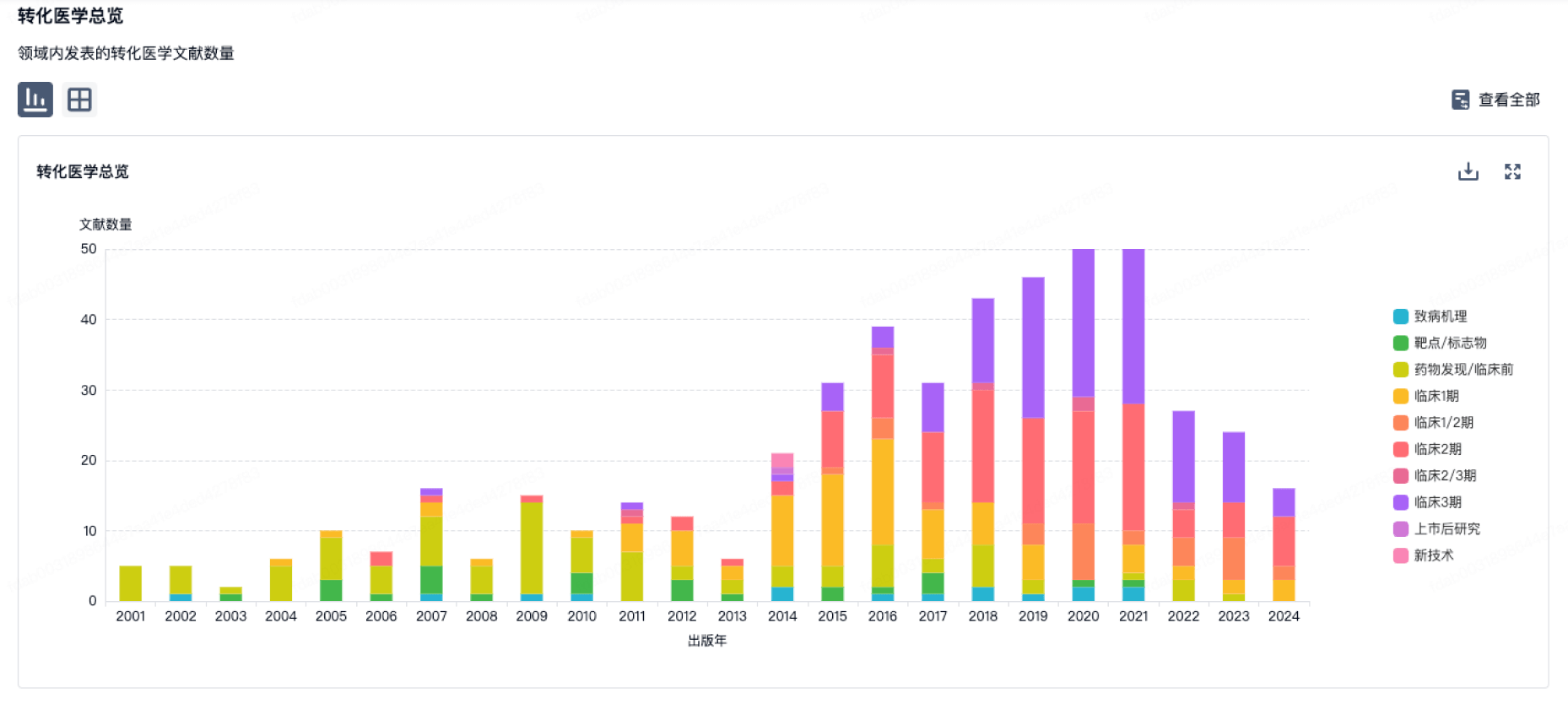
转化医学
使用我们的转化医学数据加速您的研究。
登录
或
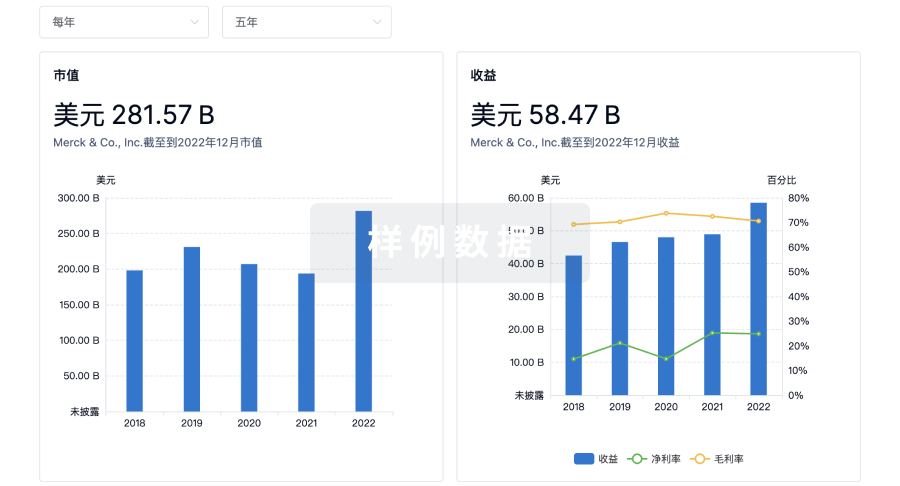
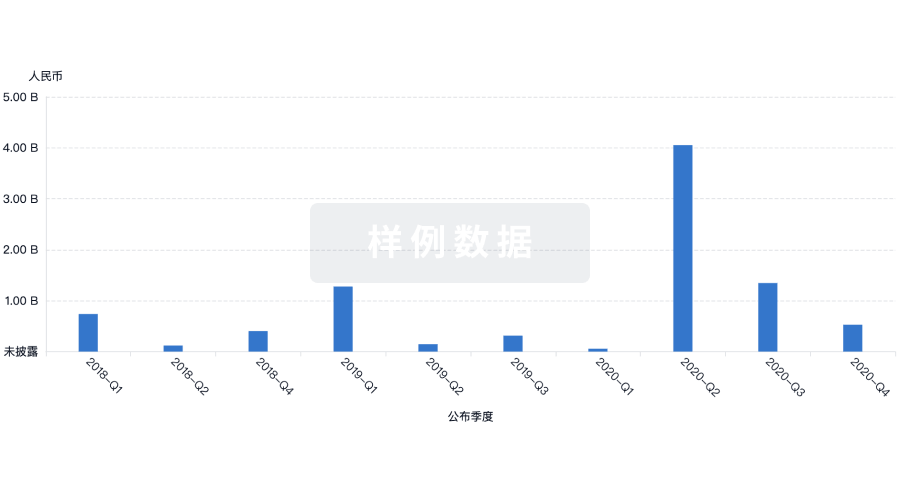
营收
使用 Synapse 探索超过 36 万个组织的财务状况。
登录
或
科研基金(NIH)
访问超过 200 万项资助和基金信息,以提升您的研究之旅。
登录
或

投资
深入了解从初创企业到成熟企业的最新公司投资动态。
登录
或

融资
发掘融资趋势以验证和推进您的投资机会。
登录
或
芽仔
全新生物医药AI Agent 覆盖科研全链路,让突破性发现快人一步
立即开始免费试用!
智慧芽新药情报库是智慧芽专为生命科学人士构建的基于AI的创新药情报平台,助您全方位提升您的研发与决策效率。
立即开始数据试用!
智慧芽新药库数据也通过智慧芽数据服务平台,以API或者数据包形式对外开放,助您更加充分利用智慧芽新药情报信息。
生物序列数据库
生物药研发创新
免费使用
化学结构数据库
小分子化药研发创新
免费使用