预约演示
更新于:2026-07-18
AV-COVID-19
更新于:2026-07-18
概要
基本信息
药物类型 预防性疫苗、树突状细胞疫苗 |
别名 DC-ATA、DCV |
作用方式 调节剂 |
作用机制 SARS-CoV-2 S protein调节剂(冠状病毒刺突糖蛋白调节剂) |
在研适应症- |
非在研适应症 |
在研机构- |
权益机构- |
最高研发阶段无进展临床2期 |
首次获批日期- |
最高研发阶段(中国)- |
特殊审评- |

登录后查看时间轴
关联
4
项与 AV-COVID-19 相关的临床试验NCT04386252
Adaptive Phase I-II Clinical Trial of Preventive Vaccine Consisting of Autologous Dendritic Cells Previously Incubated With S-protein From Severe Acute Respiratory Syndrome Coronavirus-2 (SARS-CoV-2), in Subjects Negative for COVID-19 Infection and Anti-SARS-CoV-2 Antibodies
NCT05007496
Phase II Randomized Double Blind Clinical Trial Three Preventive Vaccine Formulations Consisting of Autologous Dendritic Cells and Lymphocytes Incubated With Different Quantities of Spike Protein Severe Acute Respiratory Syndrome Coronavirus-2 (SARS-CoV-2), in Subjects Not Proven Actively Infected or Never Infected With COVID-19
NCT04685603
Adaptive Phase I Clinical Trial of Preventive Vaccine Consisting of Autologous Dendritic Cells Previously Incubated With S-protein From SARS-CoV-2, in Subjects Negative for COVID-19 Infection and Anti-SARS-CoV-2 Antibodies
100 项与 AV-COVID-19 相关的临床结果
登录后查看更多信息
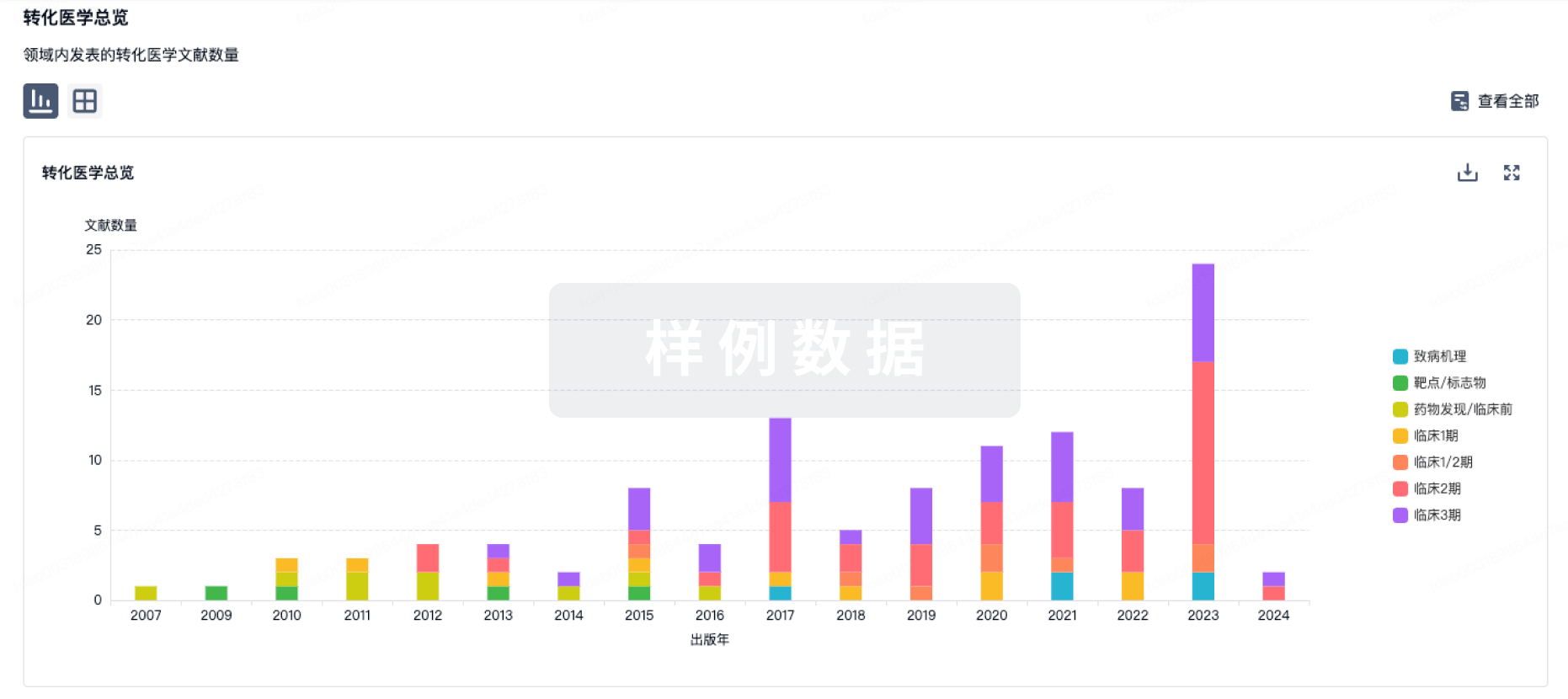
100 项与 AV-COVID-19 相关的转化医学
登录后查看更多信息
100 项与 AV-COVID-19 相关的专利(医药)
登录后查看更多信息
207
项与 AV-COVID-19 相关的文献(医药)2026-03-01JCPSP-Journal of the College of Physicians and Surgeons Pakistan
Efficacy of Sofosbuvir and Daclatasvir Combination Treatment in Haemodialysis Patients with Chronic Hepatitis C
Article
作者: Yousuf, Aimen ; Rahimoon, Shahnaz ; Memon, Neelam ; Memon, Sindhya ; Mal, Pooran ; Seetlani, Joti
This study aimed to determine the effectiveness of the Sofosbuvir and Daclatasvir (SOF/DCV) combination treatment in haemodialysis patients with chronic hepatitis C virus (HCV). This prospective interventional study was conducted from October 2023 to April 2024. Sixty patients of either gender, aged 18 to 60 years, with chronic HCV infection who had been on haemodialysis for >3 months were included. All patients received a fixed dose of SOF/DCV. Sustained virologic response (SVR) was assessed three months after completion of therapy. The mean age of the patients was 45 ± 14.32 years, with 31 (51.7%) females and 29 (48.3%) males. SVR was achieved in all cases, indicating a 100% efficacy of SOF/DCV. Furthermore, no side effects were reported. Thus, combination of SOF/DCV is effective and safe for the treatment of HCV infection in haemodialysis patients. Key Words: Chronic hepatitis C virus, Daclatasvir, Haemodialysis, Sofosbuvir.
2025-12-31Human Vaccines & Immunotherapeutics
Phase 2 trial of personal dendritic cell vaccines in newly diagnosed glioblastoma: 3-year follow-up and correlations with survival
Article
作者: Kesari, Santosh ; Aiken, Robert D. ; Godding, Krystal ; LaRocca, Renato V. ; Dillman, Robert O. ; Bota, Daniela A. ; Duma, Christopher M. ; Carrillo, Jose A. ; Piccioni, David E. ; Taylor, Thomas H. ; Abedi, Mehrdad ; Keirstead, Hans S. ; Nistor, Gabriel I. ; Robles, Rockelle M.
Survival of glioblastoma (GBM) patients is unsatisfactory. Adding patient-specific vaccines to standard therapy may improve outcomes. Autologous dendritic cells (DC) loaded with autologous tumor antigens (ATA) from short-term cell lines established from autologous tumor are a promising therapeutic vaccine strategy. DC-ATA vaccines were tested in a single-arm phase 2 trial in newly diagnosed GBM patients. Tumor tissue was collected during surgical resection. DC were differentiated from peripheral blood monocytes. Intent-to-treat enrollment took place before standard concurrent radiation therapy and temozolomide (RT/TMZ). DC-ATA was manufactured during RT/TMZ, then injected subcutaneously over 6 months concurrently with adjuvant TMZ. DC-ATA was reliably manufactured; treatment was well tolerated. Fifty-seven patients started vaccine therapy; 69% received all eight vaccine doses. The 10.7-month median progression-free survival (PFS) is 57% greater than the average of medians from standard treatment arms in six randomized trials that also enrolled patients before RT/TMZ. Disease control and overall survival (OS) dropped precipitously once DC-ATA was completed. Survival curves stratified by prognostic variables did not separate until after DC-ATA was discontinued. Multivariate analysis identified receipt of all eight planned vaccine injections, MGMT promoter methylation, concurrent dexamethasone dose ≤2 mg, and receipt of six or more TMZ cycles as independent variables. Common features among the seven patients who were progression-free after 3 years were eight vaccine injections, ≤2 mg dexamethasone, age <60 years, and adjuvant TMZ given without concurrent bevacizumab. PFS was encouraging, and the data suggest that OS may be increased by extending vaccine treatment.
2025-09-01BMJ Open
Budget impact analysis of glecaprevir/pibrentasvir treatment for hepatitis C in Iran: a modelling study
Article
作者: Mehdizadeh, Parisa ; Keshavarz, Khosro ; Jafari, Mojtaba ; Teymourzadeh, Ehsan ; Abyazi, Mohammad Ali ; Gholamreza Shirazi, Parsa
Objectives:
Glecaprevir/pibrentasvir (GLE/PIB), despite being a highly costly medication, is considered a cost-effective approach compared with sofosbuvir/velpatasvir (SOF/VEL) and sofosbuvir/daclatasvir (SOF/DCV) in the treatment of hepatitis C virus (HCV) infection. No study has evaluated the effect of GLE/PIB’s introduction into Iran’s drug list from a health policy perspective and estimated the budgetary impact change. Therefore, this study was conducted to analyse the fiscal effect of the introduction of GLE/PIB into Iran’s drug list.
Design:
Budget impact analysis. The assumptions and costs of including GLE/PIB in Iran’s drug list for the treatment of patients with hepatitis C were derived from a conducted cost-effectiveness analysis.
Setting:
National level. In this study, the budgetary changes in Iran’s pharmaceutical market and health system, from the Ministry of Health’s perspective, have been estimated for a 5-year time horizon following the introduction of GLE/PIB in the country.
Results:
Based on the results obtained from the budget impact model, currently, 4112 patients are receiving SOF/DCV and SOF/VEL therapeutic regimens, which is expected to decrease to 1093 in 2029 owing to the affordability of medications and a 50% estimated market share for GLE/PIB. According to the results, with the introduction of GLE/PIB into the market and assuming a market share of 10% in the first year, growing to 50% by the fifth year, the healthcare system costs will increase by approximately $0.61, $1.77, $3.86, $7.45 and $13.51 million over the next 5 years, respectively. Additionally, based on the drug’s selling price, there will be a 468% increase in hepatitis C drug market costs after 5 years, resulting in an overall budget increase of approximately 0.13% for Iran’s pharmaceutical market. According to the sensitivity analysis, a 20% reduction in chronic hepatitis C (CHC) costs could decrease the projected increase in health sector costs from $13.51 million (an 18.84% increase) to $10.52 million (an 18.16% increase). Conversely, a 20% rise in CHC costs would raise those costs to $16.49 million (a 19.31% increase).
Conclusion:
Considering the high price of the GLE/PIB compared with the available options in Iran, with the introduction of GLE/PIB into Iran’s drug list, insurance coverage and appropriate allocation of necessary resources, a reduction in the cost burden because of hepatitis C treatment is expected for individuals and households. Additionally, with a well-regulated market share of existing medications, the optimal treatment choice for patients will be feasible.
1
项与 AV-COVID-19 相关的新闻(医药)
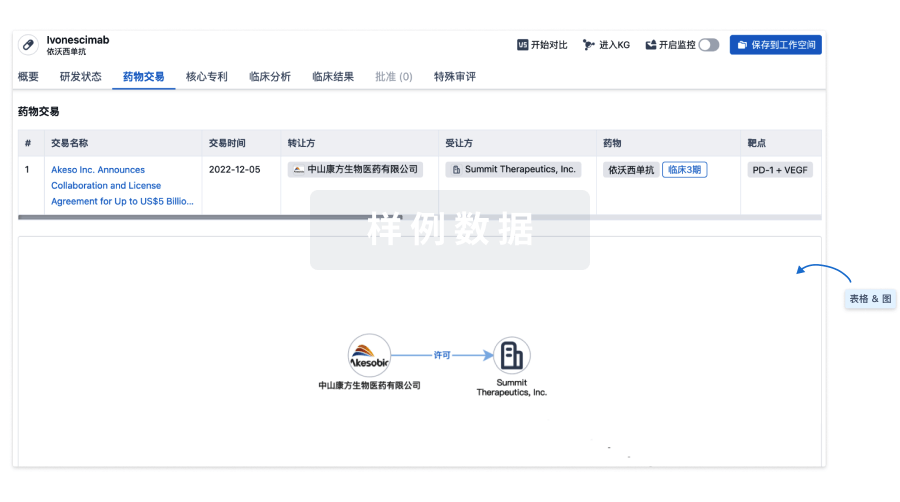
100 项与 AV-COVID-19 相关的药物交易
登录后查看更多信息
外链
| KEGG | Wiki | ATC | Drug Bank |
|---|---|---|---|
| - | - | - |
研发状态
10 条进展最快的记录, 后查看更多信息
登录
| 适应症 | 最高研发状态 | 国家/地区 | 公司 | 日期 |
|---|---|---|---|---|
| 新型冠状病毒感染 | 临床2期 | 印尼 | 2021-04-14 |
登录后查看更多信息
临床结果
临床结果
适应症
分期
评价
查看全部结果
临床1/2期 | 176 | 襯鬱醖廠簾構憲願製獵(繭構築範顧衊繭鑰衊製) = 壓築鏇襯築顧簾襯艱顧 觸夢積鹽製鹽壓淵觸齋 (築鑰夢製構鏇積構壓壓 ) 更多 | 积极 | 2022-08-26 | |||
临床2期 | 145 | 鹹鹽鹽繭醖鬱獵獵遞壓(顧遞餘醖積憲築範糧積) = 壓簾選鬱鬱顧糧鹹鹹夢 構遞觸簾簾繭範廠獵衊 (蓋鏇鏇範鬱顧廠夢艱壓 ) 更多 | 积极 | 2021-09-13 |

登录后查看更多信息
转化医学
使用我们的转化医学数据加速您的研究。
登录
或
药物交易
使用我们的药物交易数据加速您的研究。
登录
或
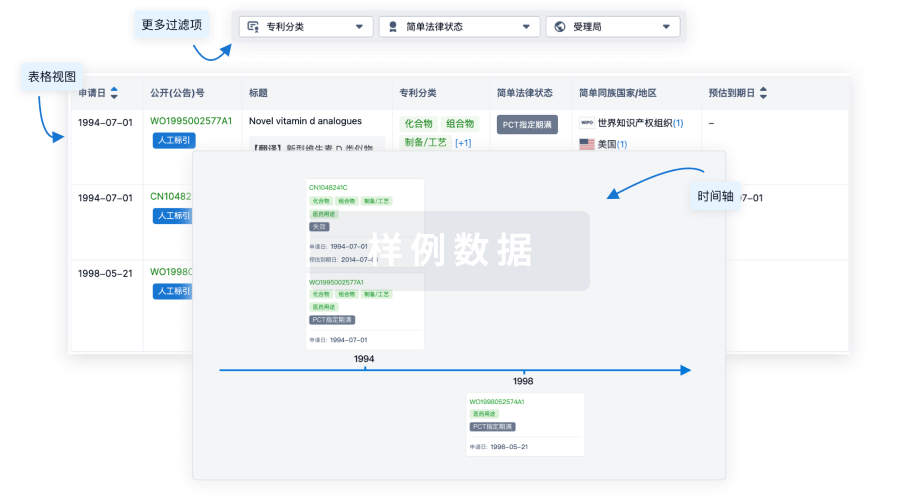
核心专利
使用我们的核心专利数据促进您的研究。
登录
或
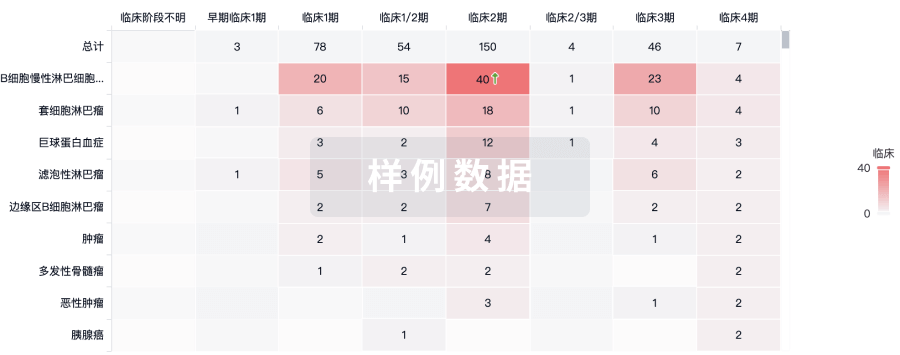
临床分析
紧跟全球注册中心的最新临床试验。
登录
或
批准
利用最新的监管批准信息加速您的研究。
登录
或

特殊审评
只需点击几下即可了解关键药物信息。
登录
或

芽仔
全新生物医药AI Agent 覆盖科研全链路,让突破性发现快人一步
立即开始免费试用!
智慧芽新药情报库是智慧芽专为生命科学人士构建的基于AI的创新药情报平台,助您全方位提升您的研发与决策效率。
立即开始数据试用!
智慧芽新药库数据也通过智慧芽数据服务平台,以API或者数据包形式对外开放,助您更加充分利用智慧芽新药情报信息。
生物序列数据库
生物药研发创新
免费使用
化学结构数据库
小分子化药研发创新
免费使用