预约演示
更新于:2025-12-09

Nagoya University
更新于:2025-12-09
概览
标签
肿瘤
神经系统疾病
其他疾病
小分子化药
细胞疗法
CAR-T
疾病领域得分
一眼洞穿机构专注的疾病领域

技术平台
公司药物应用最多的技术
靶点
公司最常开发的靶点
关联
靶点 |
作用机制 |
在研机构 |
原研机构 |
在研适应症 |
非在研适应症 |
最高研发阶段 |
首次获批国家/地区 |
首次获批日期 |
靶点 |
作用机制 |
在研机构 |
原研机构 |
在研适应症 |
非在研适应症 |
最高研发阶段 |
首次获批国家/地区 |
首次获批日期 |
靶点 |
作用机制 |
在研机构 |
原研机构 |
在研适应症 |
非在研适应症 |
最高研发阶段 |
首次获批国家/地区 |
首次获批日期 |
NCT06983210
Multi-center, Open-Label, Single Arm Trial for Evaluation of the Efficacy and Safety in the First Line Combination Therapy of Gemcitabine, Cisplatin and Nivolumab With Additional Pretreatment of AM80 for Urothelial Carcinoma Patients
NCT06862596
A Multicenter, Randomized, Placebo-controlled, Double-blind Clinical Trial:
The Efficacy and Safety of Mexiletine Hydrochloride for Amelioration of Motor Dysfunction in Spinal and Bulbar Muscular Atrophy
JPRN-UMIN000055052
Influence of differences in flexibility on stretching effectiveness - Influence of differences in flexibility on stretching effectiveness
100 项与 Nagoya University 相关的临床结果
登录后查看更多信息
登录后查看更多信息
2026-02-01NUTRITION
Extracellular water-to-total body water ratio and its relationship with activities of daily living in older inpatients in a convalescent setting
Article
作者: Akazawa, Naoki ; Uchiyama, Yasushi ; Okawa, Naomi ; Nagahiro, Shinji ; Hioka, Akemi
OBJECTIVE:
The aim of this study was to examine whether the extracellular water-to-total body water ratio (ECW/TBW) is associated with activities of daily living (ADLs) in older inpatients in a convalescent setting, and to determine whether ECW/TBW or skeletal muscle mass index (SMI) is more strongly correlated with ADLs.
DESIGN:
Retrospective study.
SETTING AND PARTICIPANTS:
A total of 196 older inpatients (86 males and 110 females) admitted to a convalescent rehabilitation ward were included.
METHODS:
The primary outcomes were ECW/TBW and ADLs at admission. ECW/TBW and SMI were measured using segmental multifrequency bioelectrical impedance analysis. ADLs were assessed with the Functional Independence Measure (FIM) motor score. Multiple linear regression analysis, adjusted for confounding factors, was performed to determine whether ECW/TBW was independently and significantly associated with FIM motor scores in male and female groups.
RESULTS:
The study cohort included 56 patients with stroke (28.6%), 45 with musculoskeletal disease (23.0%), and 95 with hospital-associated deconditioning (48.5%). The median (interquartile range; IQR) age was 81.0 (75.0-88.0) years in males and 87.0 (81.8-90.3) years in females. The median (IQR) ECW/TBW was 0.412 (0.404-0.421) in males and 0.419 (0.411-0.427) in females. The median (IQR) FIM motor score was 19.5 (14.0-39.0) in males and 23.0 (14.0-42.0) in females. In males, ECW/TBW was negatively associated with FIM motor scores, whereas SMI was positively associated. In females, ECW/TBW was negatively associated with FIM motor scores, whereas SMI was not significantly related.
CONCLUSIONS AND IMPLICATIONS:
ECW/TBW was negatively associated with ADLs in older inpatients in a convalescent setting in both sexes. Although SMI was positively associated with ADLs in males, no such relationship was observed in females. These findings suggest that monitoring ECW/TBW may be a useful approach for evaluating ADLs in older inpatients.
2026-02-01JOURNAL OF CRITICAL CARE
Recovery of motor functions and cognitive functions in patients with intensive care unit–acquired weakness
Article
作者: Hoshiyama, Minoru ; Suzuki, Shogo ; Umikawa, Mako ; Aoyama, Yusuke ; Okazaki, Masaki
PURPOSE:
This study aimed to identify factors influencing recovery of activities of daily living (ADLs) in patients with ICU-acquired weakness (ICU-AW) after ICU discharge.
METHODS:
A retrospective cohort study was conducted with 65 ICU-AW patients. Data were collected from ICU discharge to four weeks post-discharge. Variables analyzed included age, sex, APACHE-II score, mechanical ventilation duration, and presence of delirium. The primary outcome was ADL recovery. Multiple regression analysis was performed using data at ICU discharge, and a linear mixed model assessed changes in motor Functional Independence Measure (FIM) scores.
RESULTS:
Median age was 61 years (IQR: 50-70), with females comprising 44.6 %. Median APACHE-II score was 25 (IQR: 20-29), and 69.2 % were surgical ICU patients. Median mechanical ventilation duration was 19 days (IQR: 10-34), and delirium lasted a median of three days (IQR: 1-7). Multivariable analysis showed cognitive FIM score at ICU discharge (β = 19.12, p = 0.001) and delirium duration (β = -9.83, p < 0.001) were independently associated with ADL recovery. The linear mixed model revealed a significant difference in motor FIM gain between patients with preserved cognition and those with cognitive dysfunction (p = 0.001).
CONCLUSIONS:
Cognitive function at ICU discharge and delirium duration significantly predicted ADL recovery. These factors should be considered in post-ICU rehabilitation planning.
2026-02-01ACCIDENT ANALYSIS AND PREVENTION
Why do drivers brake later than AEB in rear-end collisions? An analysis based on drive recorder videos
Article
作者: Lin, Yifan ; Zhao, Yuqing
Rear-end collisions are among the most common crash types in Japan. However, due to their relatively low fatality and injury severity, research on them remains limited. Although previous studies have shown the effectiveness of autonomous emergency braking (AEB), further studies is needed to improve understanding of driver-related factors and enhance system performance to reduce collision risk. This study investigated the effectiveness of AEB and explored factors contributing to braking delays by reconstructing 52 real-world taxi collisions exceeding 10 km/h using PC-Crash. Simulations were conducted with time-to-collision (TTC) and TTC2nd-based (considering relative deceleration) AEB to evaluate collision-avoidance performance. Additionally, a decision tree was used to examine environmental, vehicular, and human factors affecting the time difference between driver-initiated braking and AEB activation. The result indicates that AEB installed in taxis effectively reduced rear-end collisions. TTC2nd-based AEB could avoid more collisions involving decelerating lead vehicles. Reducing AEB delay times could further enhance prevention. However, the AEB simulation showed limited effectiveness in collisions involving high speeds, wet roads, or sudden deceleration of the lead vehicle. Moreover, the primary reason drivers braked later than the simulated AEB was their failure to maintain a forward gaze before collisions. Drivers were more likely to divert their gaze from forward driving-related areas in non-critical situations, such as low-speed driving or red traffic signals ahead. This study provides quantitative insights into human factors and AEB technology, which may inform the optimization of AEB systems and the development of driver monitoring systems, contributing to collision prevention and traffic safety.
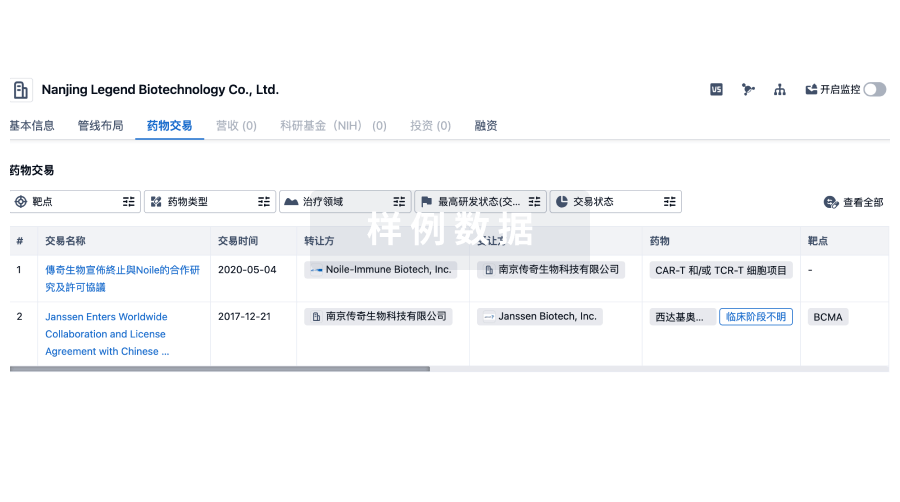
100 项与 Nagoya University 相关的药物交易
登录后查看更多信息
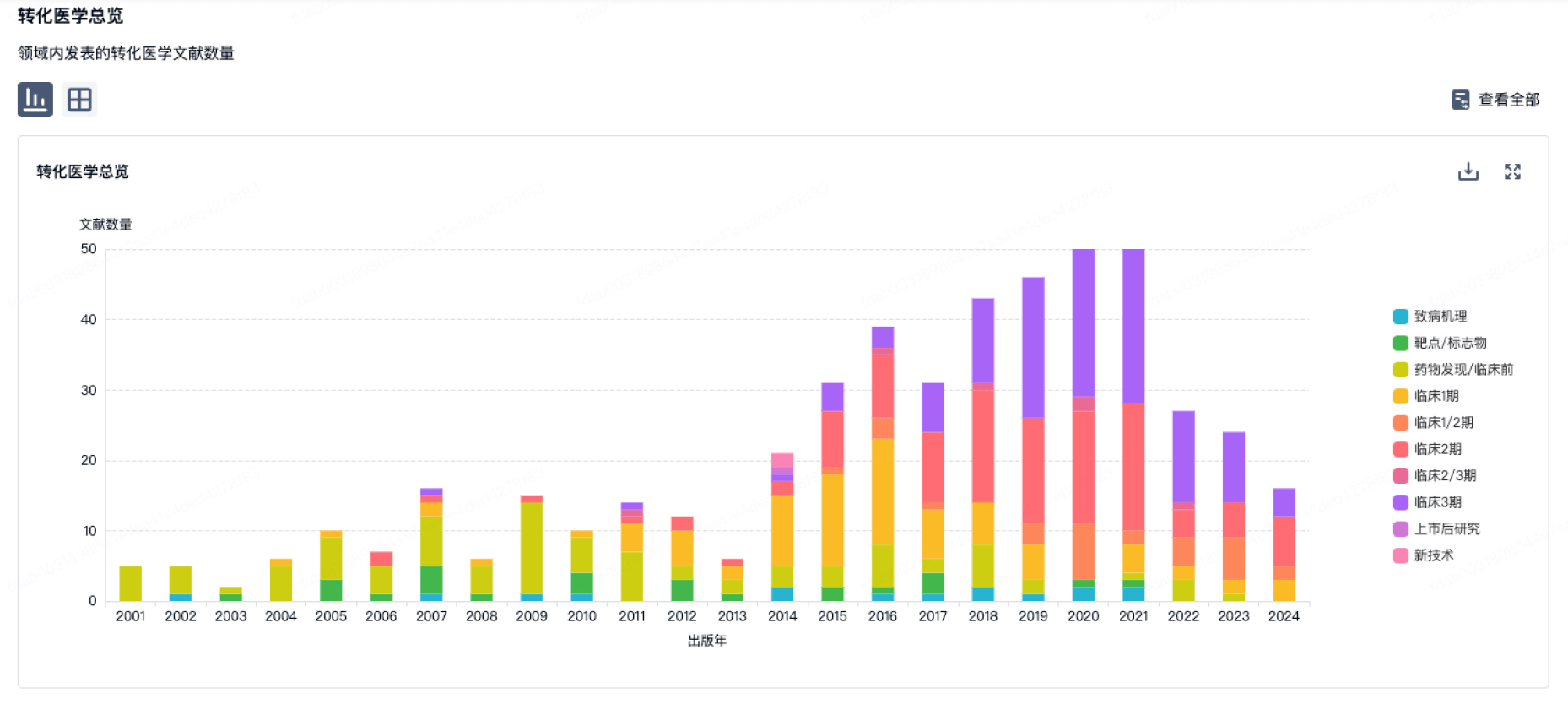
100 项与 Nagoya University 相关的转化医学
登录后查看更多信息
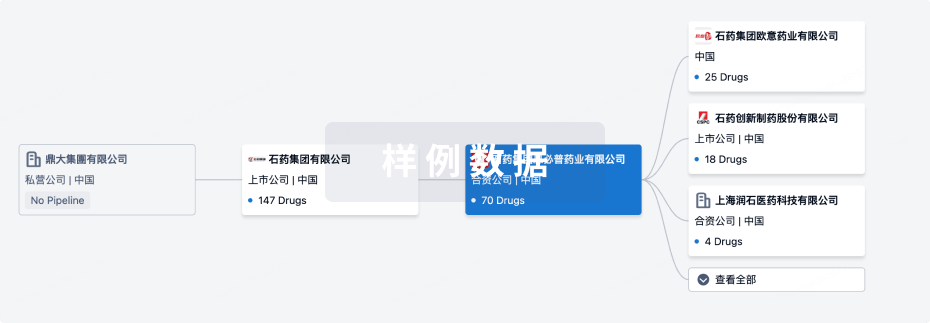
组织架构
使用我们的机构树数据加速您的研究。
登录
或
管线布局
2026年07月21日管线快照
管线布局中药物为当前组织机构及其子机构作为药物机构进行统计,早期临床1期并入临床1期,临床1/2期并入临床2期,临床2/3期并入临床3期
药物发现
3
18
临床前
临床1期
2
1
临床3期
其他
16
登录后查看更多信息
当前项目
登录后查看更多信息
药物交易
使用我们的药物交易数据加速您的研究。
登录
或
转化医学
使用我们的转化医学数据加速您的研究。
登录
或
营收
使用 Synapse 探索超过 36 万个组织的财务状况。
登录
或
科研基金(NIH)
访问超过 200 万项资助和基金信息,以提升您的研究之旅。
登录
或

投资
深入了解从初创企业到成熟企业的最新公司投资动态。
登录
或
融资
发掘融资趋势以验证和推进您的投资机会。
登录
或
芽仔
全新生物医药AI Agent 覆盖科研全链路,让突破性发现快人一步
立即开始免费试用!
智慧芽新药情报库是智慧芽专为生命科学人士构建的基于AI的创新药情报平台,助您全方位提升您的研发与决策效率。
立即开始数据试用!
智慧芽新药库数据也通过智慧芽数据服务平台,以API或者数据包形式对外开放,助您更加充分利用智慧芽新药情报信息。
生物序列数据库
生物药研发创新
免费使用
化学结构数据库
小分子化药研发创新
免费使用